

Das Team

Jonni Westphalen
IT, Intersystemkommunikation Jonni Westphalen arbeitet in verschiedenen Bereichen des Teams und studiert…
Thomas Cimiega
SONAR, Algorithmik. Thomas Cimiega ist zuständig für die SONAR-Daten Interpretation zur Navigation…
Lars M. Wolff
Sensorik, Navigation. Lars Wolff arbeitet in vielen Bereichen der Schnittstellen zu Sensoren,…
Uwe B. Ruhland
Platinendesign, µC Programmierung, Organisation. Uwe entwickelt Platinen für die AUVs, die er…
Max Stickel
Aktorik, Konstruktion. Max Stickel beendete seinen Bachelor in Mechatronik. In seinem Semesterprojekt…
Prof. Dr. Sabah Badri-Höher
Teamleitung. Prof. Dr. Sabah Badri-Höher ist die Leiterin der DSV-AG an der…
Torben Klatte
Leiterplatten Design, µC Programmierung Torben entwickelt Platinen und kümmert sich um die…
Jan Marques Bockholt
Microcontroller, Platinenentwicklung Jan Marques Bockholt arbeitet derzeit er an einem Unterwassermodem für…
Daniel Grabowski
Elektronik, Hardware Daniel Grabowski beschäftigt sich in Rahmen seiner Werkstudententätigkeit mit der…Produkte
Robbe 131
Der Allrounder Das AUV Robbe 131 wird seit 2013 an der Fachhochschule…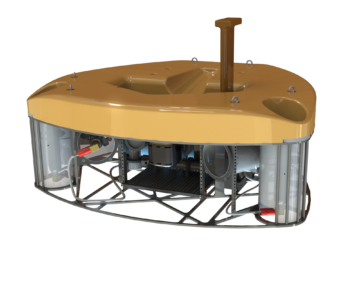
HeliROV
Der Offshore-Inspektor Das HeliROV wurde ab 2015 entwickelt, um Inspektionen an Offshore-Bauwerken…
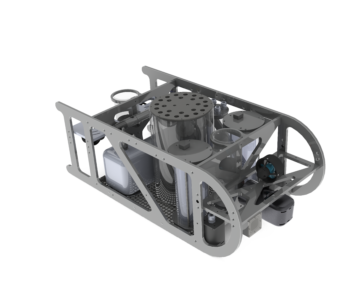
Rucksack AUV
Das Leichtgewicht Das Rucksack AUV ist die zweite Generation von AUVs der…Letzte News

Aktuelle Projekte: Das RAUV bekommt neue Augen, Ohren und Fühler!
Wir waren fleißig und haben mit Hilfe unserer Studenten einige Neuerungen in das Rucksack AUV einbringen können: Stereoskopie Alya arbeitet an ihrer Projektarbeit an einer Entfernungsschätzung zum Meeresboden mit Hilfe von Stereoskopie. Dazu wurden zwei Kameras in eine selbst erstellte […]

Erster Platz in der Grand Challenge für das AUV-Team TomKyle und Telerob!
Es war eine lange, harte Woche mit Pleiten und Pannen, doch am Ende konnte das AUV-Team zusammen mit Telerob den Sieg in der Grand Challange bei der European Robotics League 2019 erlangen. Doch fangen wir von vorne an: In diesem […]

Die Interdisziplinären Wochen
Das AUV-Team-TomKyle bat auch dieses Jahr einen Kurs in den Interdisziplinären Wochen (IDW) der Fachhochschule Kiel an. “Künstliche Intelligenz trifft auf Unterwasser Robotik” war nicht nur der Kursname, sondern auch Programm: Neben Vorträgen des Teams über die Unterwasserwelt, AUVs, Sensordatenverarbeitung […]